Balken-Element B2
B: Beam, 2: Zwei Knoten
Beispiele mit Berechnungen siehe hier.
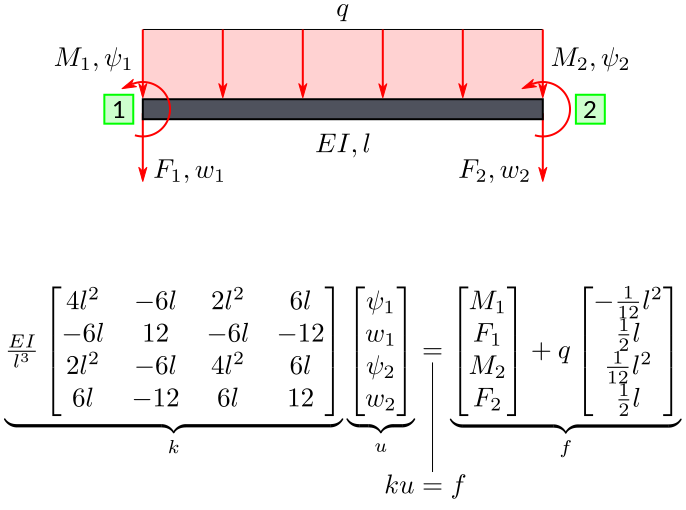
Lineares System
Note
Herleitung dieser Gleichung: B2-der-1 und B2-der-2.
Schreibweisen
Verschiedene Schreibweisen
Es gibt verschiedene Schreibweisen. Denn man kann wählen:
Welche Symbole man verwendet: \(\psi_1, w_1, \ldots , M_2, F_2\) und \(E, I, l\) können auch anders bezeichnet werden.
Welche Zählrichtungen man für dievektorwertigen Größen verwendet. D.h. in welche Richtung man die zugehörigen Pfeile zeichnet.
Wie man die 4 Aussagen in einer Matrix anordnet.
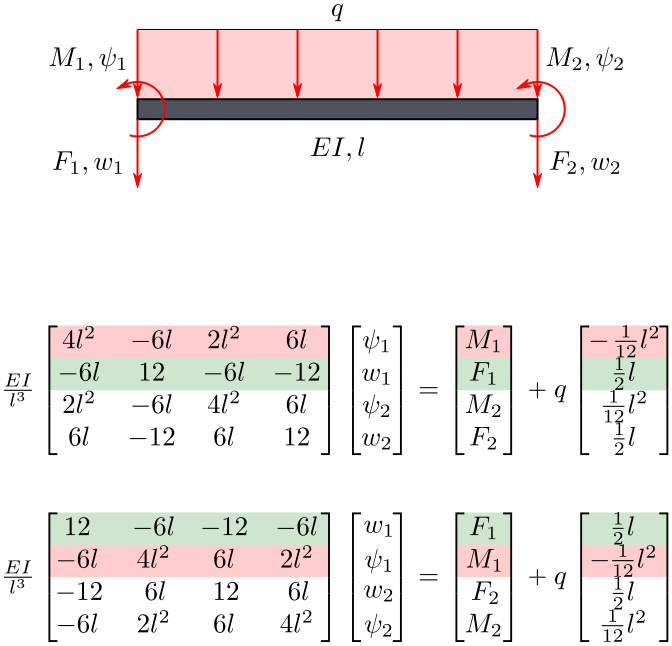
Oben: Hier verwendete Schreibweise. Unten: Schreibweise ähnlich wie im Lehrbuch FEM von Dr. Klein.
Erweiterte Steifigkeitsmatrix
Die erweiterte Element-Steifigkeitsmatrix bietet den Vorteil, dass die Freiheitsgrade \((\psi_1, w_1, \psi_2, w_2)\) sichtbar sind, auf die sich die Einträge der Steifigkeitsmatrix beziehen.
Wahl der Knoten-Reihenfolge
Wie beim Stab-Element lässt sich die Knoten-Reihenfolge vertauschen, ohne dass sich die Einträge der Steifigkeitsmatrix ändern:
Zugehörige erweiterte Steifigkeitsmatrizen:
Postprocessing / Interpolation
\(N_1, N_2, N_3, N_4, N_5\) sind die dimensionslosen Interpolationsfunktionen:
Querverschiebung w
Interpolierte Querverschiebung in Matrix-Schreibweise:
Note
Eine \(1 \times 5\)-Matrix multipliziert mit einer \(5 \times 1\)-Matrix ergibt eine \(1 \times 1\)-Matrix, also eine Zahl.
Man kann das Produkt auch so schreiben:
\[\begin{split}w &= \underbrace{ \begin{bmatrix} \psi_1 & w_1 & \psi_2 & w_2 & q \end{bmatrix} }_{1 \times 5} \underbrace{ \begin{bmatrix} l N_1 \\ N_2 \\ l N_3 \\ N_4 \\ \tfrac{l^4}{B} N_5 \end{bmatrix} }_{5 \times 1} \\ &= \underbrace{ \begin{bmatrix} l N_1 & N_2 & l N_3 & N_4 & \tfrac{l^4}{B} N_5 \end{bmatrix} }_{1 \times 5} \underbrace{ \begin{bmatrix} \psi_1 \\ w_1 \\ \psi_2 \\ w_2 \\ q \end{bmatrix} }_{5 \times 1}\end{split}\]\(w\) ist von der Ordnung \(\xi^4\).
Verdrehung ψ, Biegemoment M, Querkraft Q
Mit \(\psi=-w'\) und \(M = - B w''\) und \(Q = - B w'''\) gilt:
Graphische Darstellung
Hinweise zu den Diagrammen
Zwei Interaktive Diagramme
Schieberegler verschieben = Variieren des Knoten-Werts.
In Legende Funktion klicken = Aus- und Einblenden des Funktionsgraphen.
Horizontale Achse: Werte werden nach rechts größer - wie üblich.
Vertikale Achse: Werte werden nach unten größer.
Querverschiebung, Verdrehung, Biegemoment, Querkraft
Interpolationsfunktionen
Äquivalente Knotenlasten
Video
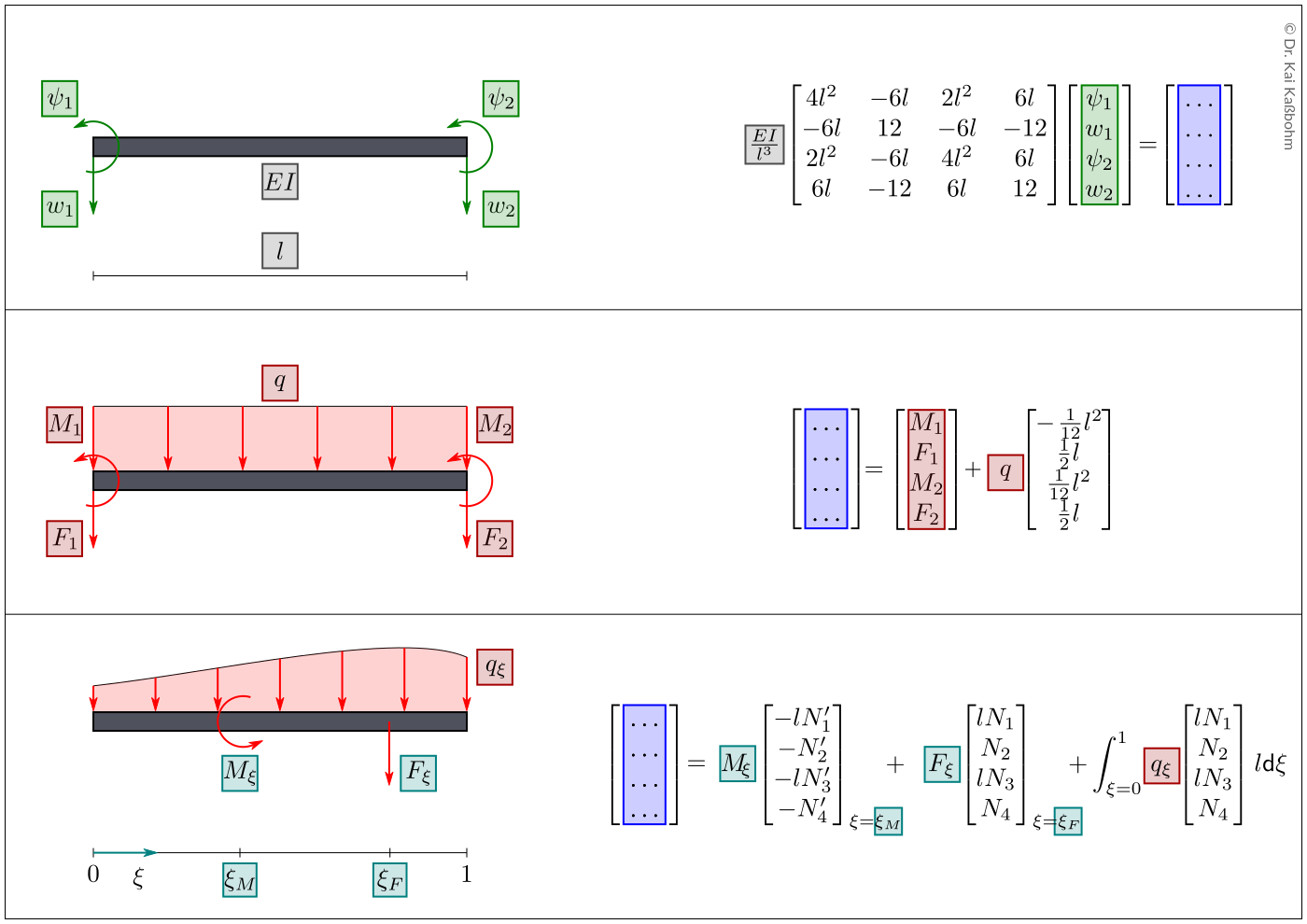
Knotenlasten aufgrund äußerer Lasten \(q_\xi, M_\xi, F_\xi\) zwischen den Element-Knoten. Oben: Lineares System. Mitte: Generische Lasten. Unten: Äquivalente Knotenlasten, Beispiel-Berechnungen hier.
Details
Generische Lasten -> Generische Rechte Seite
Momente \(M_1, M_2\) sowie Kräfte \(F_1, F_2\) an den Knoten.
Pro Element konstante verteilte \(q\)-Last.
Die FEM-Lösung gleicht der klassischen Lösung, denn das Balken-Element wurde definiert, um diese generischen Lasten abzubilden.
Die rechte Seite \(f\) im Gleichungssystem \(ku = f\) ist:
Sonstige Lasten -> Rechte Seite mit Äquivalenten Knotenlasten
Momente \(M_\xi\) an beliebiger Position \(\xi_M\) sowie Kräfte \(F_\xi\) an beliebiger Position \(\xi_F\).
Beliebig verteilte \(q_\xi\)-Last.
Die FEM-Lösung gleicht nicht der klassischen Lösung.
Die sonstigen Lasten werden umgerechnet in die Äquivalenten Knotenlasten. 1 Diese Äquivalenten Knotenlasten bilden die rechte Seite \(f\):
mit Interpolationsfunktionen und deren Ableitungen.
Fußnote:
- 1
Die bei der Umrechnung verwendete Annahme ist, dass die virtuelle äußere Arbeit der sonstigen Lasten gleich ist der virtuellen äußeren Arbeit der daraus berechneten Äquivalenten Knotenlasten.