1.5.K
Video
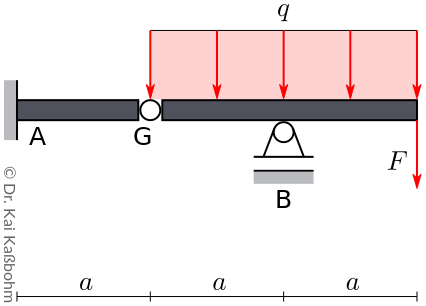
Given symbols: \(a, F, q\)
Please calculate the support reactions at A and B and the forces in hinge G. Proceed as follows.
Steps
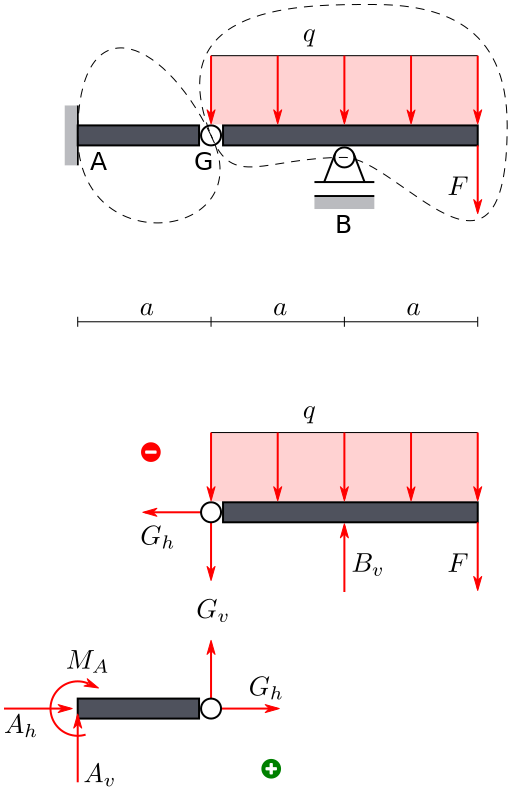
1. Free Body Diagram
Please cut:
at G: Through the hinge between the left beam and the right beam.
at A: At the boundary between the left beam and its support.
at B: At the boundary between the right beam and its support.
Draw two free body diagrams: One for the left beam - and one for the right beam.
Solution
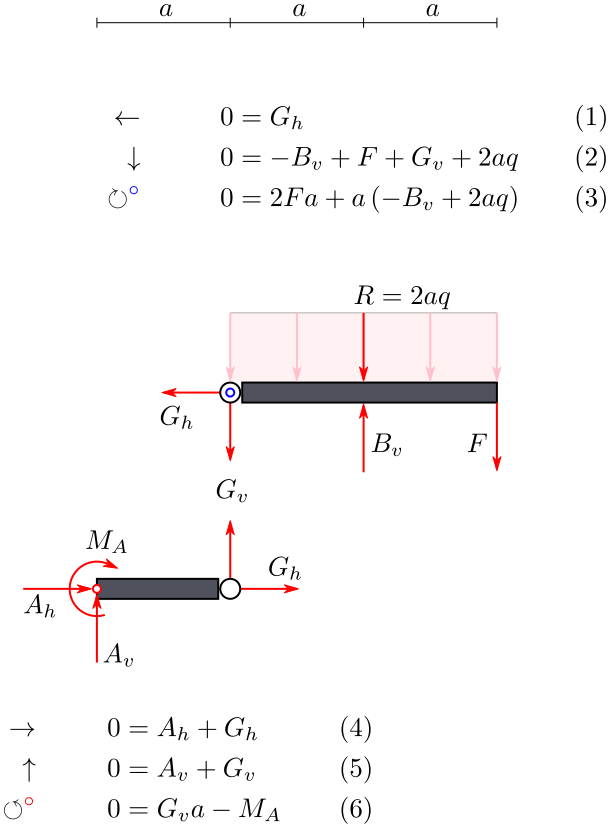
2. Resultant and Equilibrium Conditions
For the given symbols: Please calculate the resultant of the distributed load. And - for each beam - provide 3 equations (equilibrium conditions). Enumerate the equations, and count the unknowns. Show that you get 6 equations for 6 unknowns.
Solution
3. Solution using Symbols
Please calculate all unknowns in terms of the given symbols.
Solution
Solution for the six unknowns \(A_h, A_v, M_A, B_v, G_h, G_v\):
4. Solution using Quantities
Please calculate all unknowns in terms of the quantities:
Solution
5. Support Reactions Only
Show how it is possible to find the support reactions - without calculating the joint forces.
Solution
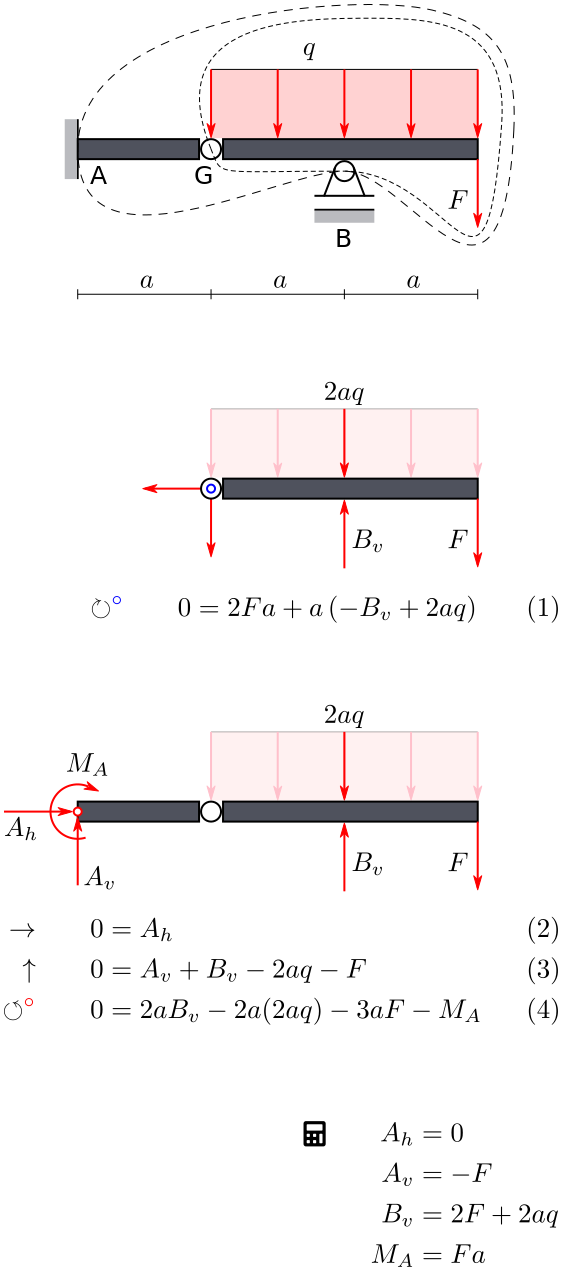
Hint
For one body, only one equilibrium condition is used.
A system of four equations for for unknowns is solved.
Solution with Python: Copy - Paste - Play
Copy: Source Code (see below) view and copy.
Paste: Paste as Python-Notebook on:
JupyterLite or
JupyterLab or
Colab (Google-Account needed)
Play: Run.
Source Code
from sympy import *
from sympy.physics.units import kg, m, s
Newton = kg*m/s**2
a, F, q = var("a, F, q")
sub_list=[
( a, 1 *m ),
( F, 1 *Newton ),
( q, 1 *Newton/m ),
]
Ah, Av, MA, Bv, Gh, Gv \
= var("Ah, Av, MA, Bv, Gh, Gv")
R = 2*a*q
# equilibrium conditions:
eq1 = Eq( Gh )
eq2 = Eq( - Bv + F + Gv + R )
eq3 = Eq( 2*a*F + a*(-Bv + R) )
eq4 = Eq( Ah + Gh)
eq5 = Eq( Av + Gv)
eq6 = Eq( Gv*a - MA )
unks = [Ah, Av, MA, Bv, Gh, Gv]
eqs = [eq1, eq2, eq3, eq4, eq5, eq6]
sol = solve(eqs, unks)
pprint(sol)
Ah, Av, MA, Bv, Gh, Gv \
= sol[Ah], sol[Av], sol[MA], sol[Bv], sol[Gh], sol[Gv]
pprint("\nAh, Av, Bv, Gh, Gv, MA in SI units:")
for s in [Ah, Av, Bv, Gh, Gv]:
tmp = s
tmp = tmp.subs(sub_list)
tmp /= Newton
pprint(tmp)
tmp = MA
tmp = tmp.subs(sub_list)
tmp /= Newton*m
pprint(tmp)
pprint("\nAh, Av, Bv, MA in SI units:")
Ah, Av, MA, Bv= var("Ah, Av, MA, Bv")
eq1 = Eq( 2*F*a + a*(-Bv + R) )
eq2 = Eq( Ah )
eq3 = Eq( Av + Bv - R - F )
eq4 = Eq( 2*a*Bv -2*a*R -3*a*F - MA )
unks = [Ah, Av, MA, Bv]
eqs = [eq1, eq2, eq3, eq4]
sol = solve(eqs, unks)
pprint(sol)
# {Ah: 0, Av: -F, Bv: 2⋅F + 2⋅a⋅q, Gh: 0, Gv: F, MA: F⋅a}
#
# Ah, Av, Bv, Gh, Gv, MA in SI units:
# 0
# -1
# 4
# 0
# 1
# 1
#
# Ah, Av, Bv, MA in SI units:
# {Ah: 0, Av: -F, Bv: 2⋅F + 2⋅a⋅q, MA: F⋅a}